electronic sensor that measures the moisture content of
the air. Mounted on the exterior of a ship, the sensor is
protected from heat and solar radiation. The
temperature measurements are accurate to within
±1.0°F over the range -40°F to 130°F, while the dew-
point temperature is accurate to within ±2.0°F over the
range -40°F to 100°F.
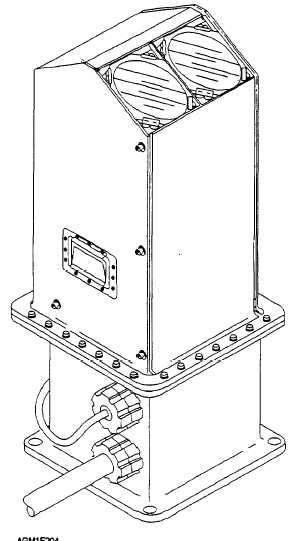
Cloud-Height Detector
The cloud-height detector is shown in figure 2-4. It
is a laser ceilometer that automatically detects cloud
layers and provides measurements for up to three cloud-
base levels. When the visibility is greater than 3 miles,
the detector can measure up to 12,000 feet. It can only
measure up to 3,000 feet when the visibility is 1 1/2 to 3
miles or during moderate to heavy rain.
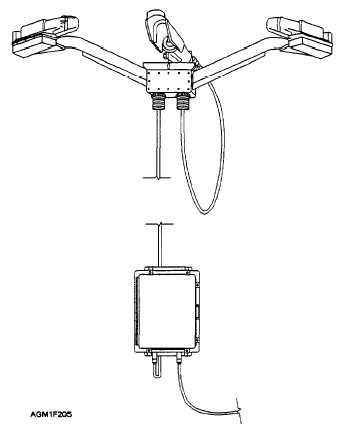
Visibility Sensor
The visibility sensor is shown in figure 2-5. It
determines equivalent visibility by measuring forward
scattering of an infrared beam by aerosols. The sensor
reports equivalent visibility over the range of zero to 10
nautical miles.
Precipitation Sensor
The precipitation sensor (fig. 2-5) uses an infrared
beam to detect the droplet size and number of droplets
falling through the sensor beam. The sensor reports
precipitation rates between 0 and 50 millimeters (mm)
per hour and the onset or cessation of precipitation.
Seawater Temperature Sensor
The seawater temperature sensor is usually located
near the ship’s seawater intake valves, below the water
line. It measures the seawater temperature in degrees
Fahrenheit andhasarange of 25.0°F to 122.0°F. Due to
the sensor being located well below the sea surface,
hand-held sea surface temperature measuring
instruments may be used in lieu of the SMOOS sensor.
METEOROLOGICAL BUOYS
A third type of automatic weather station is the
meteorological buoy. Meteorological buoys may be
Figure 2-4.—SMOOS cloud-height detector.
Figure 2-5.—SMOOS visibility sensor (on left and right arms)
and SMOOS precipitation sensor (in center).
2-4